Schwartz’s theorem is a classical tool used to derive posterior
consistency and is the foundation of many modern results for establishing
frequentist consistency of Bayesian methods.
As we discuss in our post on the original Schwartz result,
the theorem itself had somewhat limited applicability; it was straightforward to use to
establish weak consistency, provided the KL support condition on the prior
holds, but was generally not enough to guarantee posterior consistency with
respect to strong metrics, such as the L1 distance.
This is because the uniformly consistent tests do not always exist for other
metrics.
But an extension of Schwartz’s original theorem makes it much more broadly
applicable. In this post, we review the extended Schwartz theorem, show how it
can be used to recover the classical Schwartz theorem, and how it can be used to
establish “strong” posterior consistency.
For an introduction to posterior consistency and basic definitions, see
our post on the original Schwartz result.
Preliminaries and notation
We consider the same i.i.d. modeling setting as in our discussion on classical Schwartz.
Let \(\mathcal{P}\) denote our model class, which is a
space of densities
with respect to a \(\sigma\)-finite measure \(\mu\),
where \(p: \mathbb{X} \rightarrow \mathbb{R}\) is a measurable function that
is nonnegative and integrates to 1.
We denote the distribution
of a density \(p \in \mathcal{P}\) as \(P\), i.e., \(p = \frac{dP}{d\mu}\).
Denote the joint distribution of \(n \in \mathbb{N} \cup \{\infty\} \) samples by
\(P^{(n)}\).
Let \(\Pi\) be a prior distribution on our space of models \(\mathcal{P}\),
consider the following Bayesian model:
\[\begin{align}
p &\sim \Pi \\
X_1,\ldots,X_n \,|\, p &\stackrel{i.i.d.}{\sim} p,
\end{align}\]
where each \(X_i \in \mathbb{X}\).
In this post, we assume the model is well-specified and that there is some true
density \(p_0 \in \mathcal{P}\) from which the data are generated.
Under certain regularity conditions on \(\mathcal{P}\),
(a version of) the posterior distribution, \(\Pi(\cdot \,|\, X_1,\ldots, X_n)\),
can be expressed via the Bayes’s formula:
for all measurable subsets \(A \subseteq \mathcal{P} \),
The statement of the theorem in Ghosal and van der Vaart has two parts;
here we state the first part below as a theorem –
which provides tools for more general results –
and the second part as a corollary – which leads to insights directly about posterior consistency.
Lastly, we’ll discuss how to prove the classical Schwartz’s theorem using the
extended version, and how to get results on strong posterior consistency.
Theorem (Extended Schwartz).
Suppose there exists a set
\( \mathcal{P}_0 \subseteq \mathcal{P} \)
and a number \(c\) with
\(\Pi(\mathcal{P}_0) > 0 \)
and
\(K(p_0; \mathcal{P}_0) \leq c. \)
Let
\(\mathcal{P}_n \subseteq \mathcal{P}\)
be a set that satisfies
either condition (a) or condition (b) for some constant \(C > c\):
The theorem above provides some conditions under which the posterior
probability of the set \(\mathcal{P}_n \) goes to 0 with probability 1.
At the expense of its greater generality, this version of the theorem may as a
result appear more mysterious in its application.
First recall that \(\mathcal{P}\) is the space of densities of our model
class. The statement describes behaviors for two general subsets of densities
\(\mathcal{P}_0\) and \(\mathcal{P}_n\):
What are the sets \(\mathcal{P}_0\)?
These sets show up in conditions on the prior / KL divergence bound and
serve as a prior support condition.
E.g, it is applied to KL neighborhoods in the classical Schwartz theorem.
What are the sets \(\mathcal{P}_n\)?
These sets are present in the conditions (a) and (b) as well as in the asymptotic result.
The theorem allows us to establish when the posterior probability of a general subset
\(\mathcal{P}_n\ \subseteq \mathcal{P} \) is going 0 a.s., rather than a
specific subset needed to show consistency (e.g., a neighborhood of \(p_0\)).
As we’ll see below, we’ll apply this to show posterior consistency by
decomposing the complement of a neighborhood \(U^c\) into a union of two
other subsets, and apply this general theorem to each of the other subsets.
Regarding the conditions (a) and (b), note that either (a) or (b) needs to
hold to imply the result.
First note that condition (b) a special case of condition (a) when \(\phi_n = 0\),
but serves as a useful restatement of (a), as we’ll see in the proof of the
corollary.
Thus, in order to prove
\(
\Pi(\mathcal{P}_n \,|\, X_{1:n}) \stackrel{n\rightarrow\infty}{\longrightarrow} 0 ~(P_0^{(\infty)}\text{-a.s.}),
\)
we only need to assume condition (a) holds.
Condition (a). These two conditions should look familiar and close to the
classical Schwartz testing conditions.
One condition that is commonly used to verify the classical Schwartz theorem is
that the sequence of tests have exponentially small
error probabilities (Ghosh and Ramamoorthi [2], Proposition 4.4.1):
i.e., for some \(C > 0\),
where in the classical Schwartz theorem, \(\mathcal{P}_n = U^c\).
Here \(P_0^{(n)}(\phi_n) \leq e^{-Cn}\) implies,
via the Borel-Cantelli lemma, the first part of the condition in the extended
Schwartz theorem, i.e., that \(\phi_n \rightarrow 0\) a.s.
And in the extended Schwartz theorem, the second part of the condition replaces
\(\sup_{p \in U^c} P^{(n)}(1- \phi_n) \leq e^{-Cn}\)
with an integral against the prior distribution \(\Pi\) over the set of
densities in \(\mathcal{P}_n\).
Condition (b). This condition essentially says that if \(\mathcal{P}_n\)
is a set that the prior assigns a small amount of mass to, then
asymptotically, the
posterior will also assign a small amount of mass to that set.
The first term \(\phi_n\rightarrow 0\) in \(P_0^{(\infty)}\)-a.s. by the first
part of assumption (a).
Using very similar steps as the classical Schwartz proof,
the denominator is bounded below as follows: for any \(c’ > c\), eventually \(P_0^{(\infty)}\)-a.s.,
where in the last line, we applied the second part of assumption (a).
Finally, applying Markov’s inequality,
\(\sum_{n \geq 1} e^{-n(C - c’)} < \infty \) for \(C > c’\),
and so by the Borel–Cantelli lemma, the numerator goes to 0 almost surely.
Corollary: posterior consistency
The theorem above implies the following result on posterior consistency,
which is more readily compared to the statement of the classical Schwartz theorem.
Corollary (Extended Schwartz).
Consider the model
\[\begin{align}
p \sim \Pi, \qquad
X_{1:n} \,|\, p \stackrel{iid}{\sim} p \\
\end{align}.\]
Suppose that
\(p_0\) is in the KL support of the prior, i.e.,
\(p_0 \in \mathrm{KL}(\Pi)\),
and that for every neighborhood \(U\) of \(p_0\),
there exists a constant \(C > 0\),
measurable partitions
\(\mathcal{P} = \mathcal{P_{n,1}} \sqcup \mathcal{P_{n,2}}\)
and tests \(\phi_n\) such that the following conditions hold:
In particular, the conditions are essentially the same as the classical
Schwartz theorem, but now we split the space of densities \(\mathcal{P}\)
into (1) one part \(\mathcal{P}_{n,1}\) that goes into the testing condition,
and (2) another part \(\mathcal{P}_{n,2}\) that has small prior mass and therefore small posterior mass (and so does not need to be tested).
In the Bayesian asymptotics literature, the sequence of sets
\(\{\mathcal{P}_{n,1}\}\) are often called sieves.
If we take \(\mathcal{P}_{n,1} = \mathcal{P}\) and
\(\mathcal{P}_{n,2} = \emptyset\), then the extended Schwartz conditions (i) and (ii) imply
that the same testing conditions as
classical Schwartz hold, i.e., that the test sequence is uniformly consistent.
Proof of the corollary
The result follows from applying parts (a) and (b) separately from the theorem above.
(Expand for proof)
Let \(U\) be a neighborhood with radius \(\epsilon < C\).
Note that the KL condition implies that if \( \mathcal{P}_0 = U \),
then \(0 > \Pi(K_\epsilon(p_0)) \geq \Pi(U)\)
and that \(K(p_0; \mathcal{P}_0) \leq \epsilon. \)
Apply part (a) with
\( \mathcal{P}_0 = U \)
and
\( \mathcal{P}_n = U^c \cap \mathcal{P}_{n,1} \).
That is, suppose there there exist tests \(\phi_n\) such that
Then, we have that
\(\Pi(U^c \cap \mathcal{P}_{n,1} \,|\, X_{1:n}) \rightarrow 0 \) a.s.
Now apply part (b) with
\( \mathcal{P}_0 = U \) and
\( \mathcal{P}_n = \mathcal{P}_{n,2} \).
Then, we have that
\(\Pi(\mathcal{P}_{n,2} \,|\, X_{1:n}) \rightarrow 0 \) a.s.
Putting these together, we have
\[
\Pi(U^c \,|\, X_{1:n}) \leq
\Pi(U^c \cap \mathcal{P}_{n,1} \,|\, X_{1:n}) +
\Pi(\mathcal{P}_{n,2} \,|\, X_{1:n})
\rightarrow 0, \quad P_0^{(\infty)}\text{-a.s.}
\]
Strong posterior consistency
In this section, we state a theorem that establishes strong posterior consistency, i.e.,
posterior consistency with the strong topology;
this result is a consequence of applying the extended Schwartz theorem above.
Note: the statement of this corollary in Ghosal and van der Vaart (2017) [1] uses the terminology
“strongly consistent” to refer to \(P_0\)-a.s. consistency, rather than
referring to convergence in the strong topology.
Preliminaries: covering and metric entropy
In order to establish a more direct strong posterior consistency result,
the (extended Schwartz) testing condition is
replaced with a bound on the complexity of the space, which is measured by a
function of the covering number \(N(\epsilon, \mathcal{P}_{n,1}, d)\) with respect to the
set \(\mathcal{P}_{n,1} \subseteq \mathcal{P}\). In order to define
the covering number, we need to first introduce another definition.
A set \(S\) is called an \(\epsilon\)-net for \(T\) if for every
\(t \in T\), there exists \(s \in S\) such that \(d(s,t) < \epsilon\).
This means that the set \(T\) is covered by a collection of balls of radius
\(\epsilon\) around the points in the set \(S\).
The \(\epsilon\)-covering number, denoted by
\(N(\epsilon, T, d)\), is the minimum cardinality of an
\(\epsilon\)-net.
The quantity \(\log N(\epsilon, T, d)\) is called metric entropy, and
a bound on this quantity is a condition that appears in many posterior concentration
results.
Strong posterior consistency via extended Schwartz
Again we consider the model \(X_{1:n} \,|\, p \stackrel{i.i.d.}{\sim} p\) and \(p \sim \Pi \).
The following theorem leads to posterior consistnecy with respect to any distance
\(d\) that is bounded above by the Hellinger distance, e.g., the \(\mathcal{L}_1\) distance.
Theorem (strong consistency).
Let \(d\) be a distance that generates convex balls and satisfies
\(d(p_0, p) \leq d_H(p_0, p)\) for every \(p\).
Suppose that for every \(\epsilon > 0\), there exist partitions
\(\mathcal{P} = \mathcal{P}_{n,1} \sqcup \mathcal{P}_{n,2}\)
and a constant \(C > 0\) such that, for sufficiently large \(n\),
\( \log N(\epsilon, \mathcal{P}_{n,1}, d) \leq n \epsilon^2, \)
\( \Pi(\mathcal{P}_{n,2}) \leq e^{-Cn}. \)
Suppose \(p_0 \in \text{KL}_\epsilon(\Pi)\).
Then the posterior distribution is consistent at \(p_0\).
References
Ghosal and van der Vaart (2017). Fundamentals of Nonparametric Bayesian Inference (Cambridge Series in Statistical and Probabilistic Mathematics). Cambridge: Cambridge University Press.
Schwartz’s theorem for posterior consistency:
In a 1965 paper “On Bayes procedures,”
Lorraine Schwartz proved a
seminal result on Bayesian consistency of the posterior distribution, which is
the idea that as the number of data observations grows, the posterior distribution concentrates on
neighborhoods of the true data generating distribution.
Under mild regularity conditions on the prior, Schwartz’s theorem
leads directly to posterior consistency with respect to the weak topology.
In this post, we will state the theorem, discuss the conditions of the theorem,
show how the conditions are satisfied for the weak topology as well as a few situations where
its easier to satisfy the conditions, and then present a proof of the theorem.
Posterior consistency: an informal picture
Example. Suppose the true data generating distribution of the data (which is
unknown to the data analyst) is \(N(0,1)\).
The data analyst decides to model the data as i.i.d. from
Gaussians of the form
\(
\mathcal{P} = \{N(\theta, 1): \theta \in \mathbb{R}\}
\)
and place a Gaussian prior on the unknown parameter \(\theta\).
What happens to the posterior distribution as we get more and more data?
One should hope that if we have access to an infinite data sample, the posterior should converge
towards the “truth.”
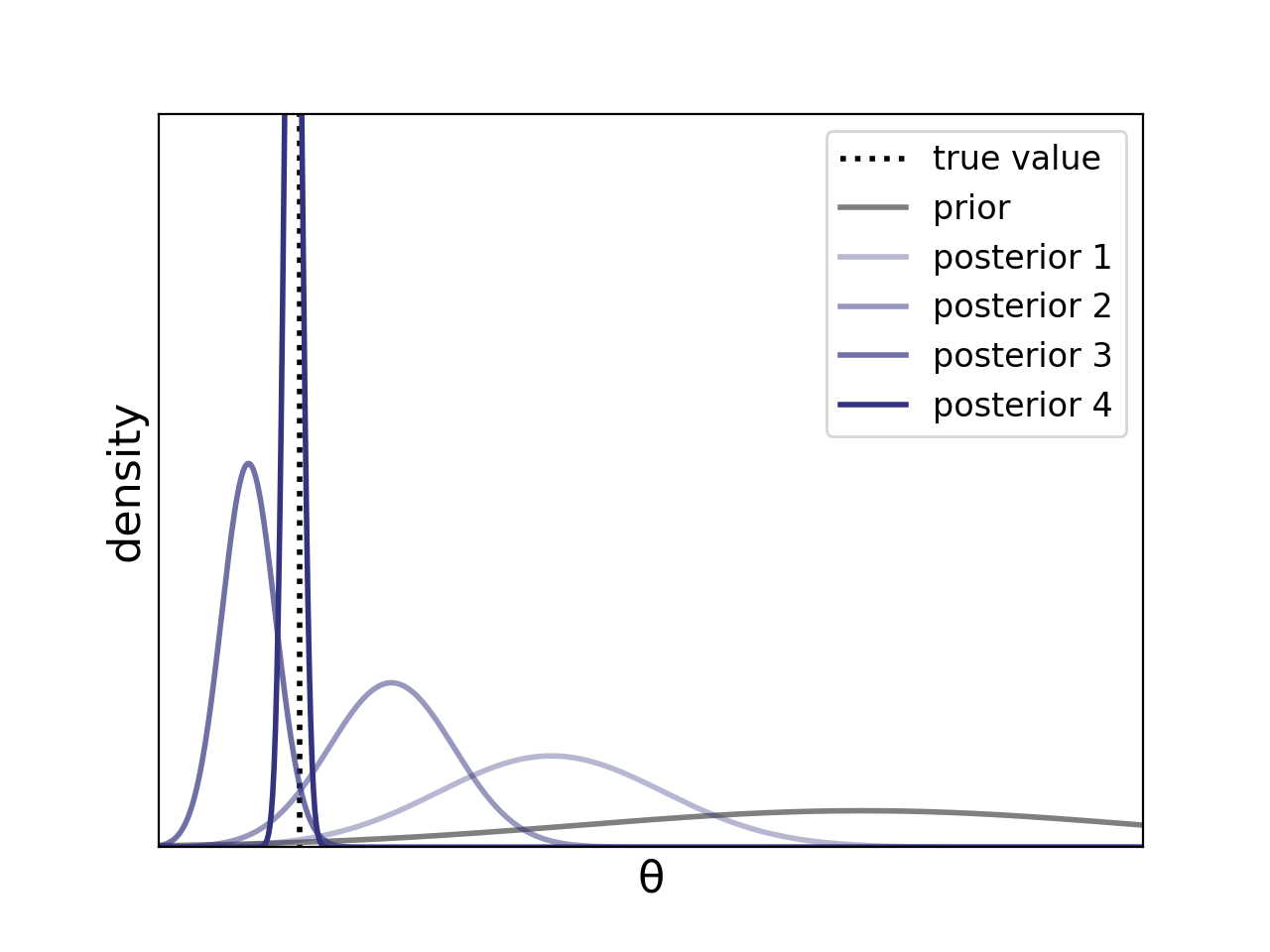
Consistency serves a check on some Bayesian analysis. Posterior consistency, which
describes the asymptotic behavior when the posterior “concentrates” around the true generating value.
In the below plot, we can see that, as we get more data (as visualized by the
darker purple curves, or “posterior 1” to “posterior 4”), the posterior mass becomes
more peaked around the true value of the parameter (indicated by the black dotted line).
Figure 1. The posterior mass becomes more concentrated around the true parameter value as we get more and more data (i.e., from “posterior 1” to “posterior 4”).
More generally, we can consider some true density \(p_0\) that lives in the
model space \(\mathcal{P}\) and a prior on the model space.
For instance in the example above, the prior on the parameter \(\theta\)
induces a distribution on the space \(\mathcal{P} = \{N(\theta,1): \theta \in \mathbb{R} \} \),
and the true density \(p_0 = N(0,1)\) is an element of \(\mathcal{P}\).
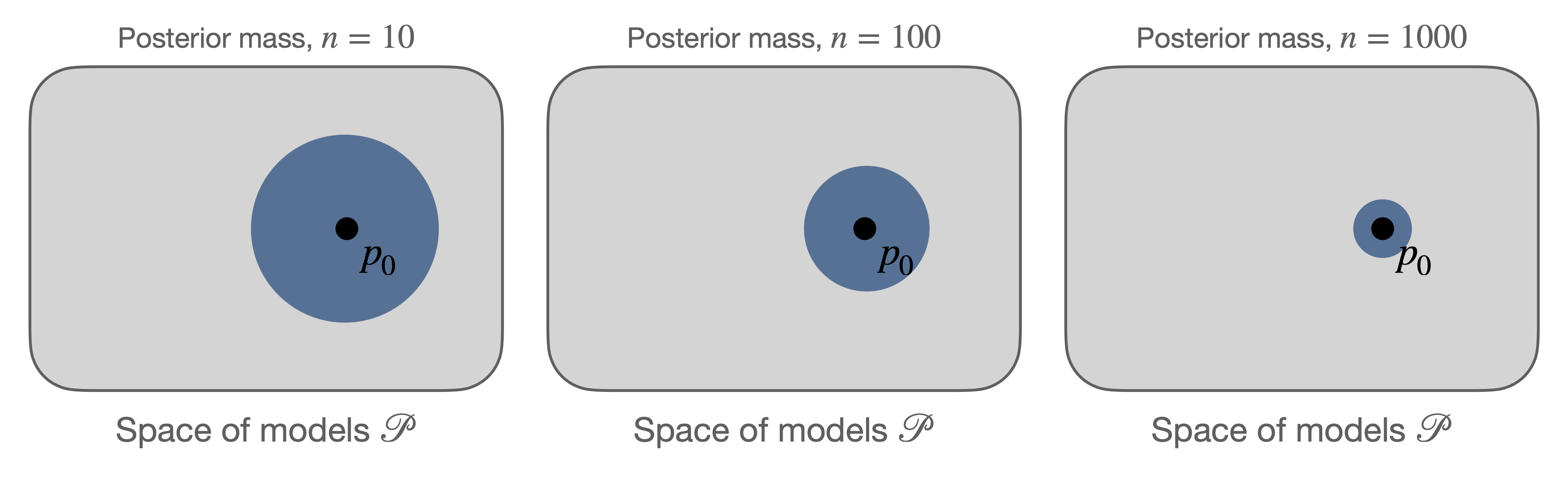
Roughly, posterior consistency means that as the number of data points \(n \rightarrow \infty\),
the posterior distribution (on the model space) will “concentrate” on the true density \(p_0\).
Below is a cartoon informally illustrating posterior concentration around \(p_0\).
Here the gray area represents the space of densities given by the model class \(\mathcal{P}\),
and the bulk of the posterior mass gets more tightly “peaked” around the
true density with more observations.
Figure 2.
Cartoon illustrating the posterior mass (blue) around the true density \(p_0\)
getting more concentrated as the number of data points increases.
In this post, we will make precise what it means for the posterior to
“concentrate” and be consistent – here as the number of data points goes to
infinity, the posterior mass on densities arbitrarily close to the true
density will converge to 1.
Then we will present Schwartz’s theorem, one of the primary foundational tools for
establishing posterior consistency.
Modeling assumptions
We consider a model class given by a space of densities \(\mathcal{P}\)
with respect to a \(\sigma\)-finite measure \(\mu\), and we denote the distribution
of a density \(p \in \mathcal{P}\) as \(P\), i.e., \(p = \frac{dP}{d\mu}\).
Denote the joint distribution of \(n \in \mathbb{N} \cup \{\infty\} \) samples by
\(P^{(n)}\).
Let \(\Pi\) be a prior distribution on our space of models \(\mathcal{P}\),
consider the following Bayesian model:
\[\begin{align}
p &\sim \Pi \\
X_1,\ldots,X_n \,|\, p &\stackrel{i.i.d.}{\sim} p,
\end{align}\]
where each \(X_i \in \mathbb{X}\).
In this post, we assume the model is well-specified and that there is some true
density \(p_0 \in \mathcal{P}\) from which the data are generated.
Under certain conditions on the topology of the parameter space, the posterior
distribution exists, and
furthermore, because we assume that for every distribution \(P\) in our model class, \(P \ll \mu\),
we can compute a version of the
posterior distribution via the Bayes’s formula (Ghosal and van der Vaart [1, Chapter 1]).
The posterior distribution
\(\Pi(\cdot \,|\, X_1,\ldots, X_n)\) can be expressed as:
for all measurable subsets \(A \subseteq \mathcal{P} \),
The posterior distribution
\(\Pi(\cdot\,|\, X_1,\ldots,X_n)\)
is consistent at \(p_0 \in \mathcal{P}\)
if for every neighborhood \(U\) of \(p_0\), with \(P_0^{(\infty)}\)-probability 1
(\(P_0^{(\infty)}\)-a.s.),
Remark 2. We typically consider the case where \(\mathcal{P} \) is a metric space, and so
the neighborhoods of interest are balls around \(p_0\), i.e.,
\(U = \{p \in \mathcal{P}: d(p_0, p) \leq \epsilon\} \).
Commonly used metrics \(d\) include a weak metric (e.g., bounded Lipschitz or Prokhorov),
a strong metric (e.g., total variation or Hellinger), or – if we’re working with
a Euclidean space for the sample space \(\mathbb{X}\) – a Kolmogorov-Smirnov metric.
Note that proving consistency with respect to a strong metric is typically more
challenging than with respect to a weak metric and requires stronger conditions.
Remark 3. There are alternative definitions of posterior consistency: sometimes
the definition is stated in terms of convergence in probability (as opposed to a.s. convergence) or consistency
defined explicitly with a specific topology in mind.
For this reason, in our definition above, we avoid the use of the terminology “weak” or “strong”
consistency, as that terminology has been used for both the type of convergence of the posterior
(i.e., convergence in probability vs a.s. convergence [1]) and to refer to the topology (i.e., weak topology vs strong topology [2]).
Implications of consistency
Posterior consistency – which represents convergence of the posterior towards
perfect knowledge – has several implications:
Frequentist connection: if the posterior is consistent, then (under some additional technical
conditions on the metric used for convergence) the posterior mean is consistent.
Bayesian connection: two Bayesian with different priors will have “merging
opinions” iff posterior consistency holds. Here a merging opinions refers to
the two posteriors of the Bayesian getting closer and closer and we observe
more data.
Schwartz’s theorem
Theorem (Schwartz).
Let \(\Pi\) be a prior on \(\mathcal{P}\). If \(p_0 \in \mathcal{P}\), and suppose the
set \(U\) satisfies:
Condition 1 (prior support): \(p_0\) is in the KL support of the prior \(\Pi\): i.e.,
for all \(\epsilon > 0\),
where
\(K(p_0, p) := \int p_0 \log\left( \frac{p_0}{p} \right) d\mu\)
is the Kullback-Leibler divergence between \(p_0\) and \(p\).
Condition 2 (testing): There exists a uniformly consistent sequence of tests for testing \(H_0: p =
p_0\) vs \(H_1: p \in U^c\): that is, there exist \(\phi_n\) such that
Remarks.
Before proving the theorem, we first explain the two main conditions of the
theorem.
The two conditions impose a constraint on the prior distribution’s support and a the model
class via a “testing condition,” respectively.
While the original Schwartz result stated above has limited applicability, small extensions
of this theorem have led to a powerful set of tools for analyzing Bayesian
asymptotics, and these tools often share assumptions of similar form by imposing
constraints on the prior and model class.
Condition 1: KL support of the prior
A basic property of the model needed for posterior consistency is that the prior
supports the true density \(p_0\).
Recall that the first condition is that the true density \(p_0\) is in the KL support of the
prior \(\Pi\), which stipulates that for all \(\epsilon > 0\),
Let \(K_\epsilon(p_0) := \{p : K(p_0, p) \leq \epsilon\}\) denote an \(\epsilon\)-KL neighborhood around \(p_0\).
Intuitively, the KL condition says that the prior distribution places positive mass on
models arbitrarily close to \(p_0\).
Note that this condition does not say anything about how much mass is near
\(p_0\)
only that there is positive mass near \(p_0\); stronger results for posterior
rates of contraction modify this condition by requiring that there is
sufficient amount of mass near the true density.
Condition 2: Uniformly consistent sequence of tests
A test function is a measurable mapping \(\phi_n: \mathbb{X}^n \rightarrow [0,1]\),
and denote a test statistic by \(\phi_n(X_1,\ldots,X_n)\).
Recall that a uniformly consistent sequence of tests \(\phi_n\) satisfies:
Intuitively, the second condition of Schwartz’s theorem is that
“the hypothesis \(H_0: p = p_0\) should be testable against complements of
neighborhoods of \(p_0\), i.e., \(H_1: p \in U^c\).”
The interpretation of the test \(\phi_n\) is that the null hypothesis
\(H_0: p = p_0\) is rejected with probability \(\phi_n\).
Given the joint distribution \(P^{(n)}\), then the interpretation of
\(P^{(n)} \phi_n\) is the probability of rejecting \(H_0\) when the data are
sampled from \(P\).
Thus, the first part of the testing condition
\(
P_0^{(n)} \phi_n \rightarrow 0
\)
has the intepretation that
the probability of a Type I error for testing \(H_0\) – i.e.,
the probability of rejecting \(H_0\) when the data are actually sampled from
\(P_0\) – vanishes.
The second part of the testing condition says that for any \(P \in U^c\),
\(
P^{(n)} (1-\phi_n) \rightarrow 0,
\)
which has the intepretation that the probability of a Type II error – if \(H_0\) is not rejected
but \(P \neq P_0\) – vanishes.
Note that due to the difficulty in directly verifying the uniformly consistent test
condition, these conditions themselves are generally not directly checked directly.
Some equivalent conditions are given in Ghosh and Ramamoorthi [2], Proposition 4.4.1.
We now discuss three well-studied examples where uniformly consistent sequence of tests exist:
(1) under the weak topology,
(2) when the sample space is countable,
and (3) when the parameter space of the model is finite-dimensional.
Example 1: Posterior consistency with respect to the weak topology
Schwartz’s theorem makes it relatively simple to prove posterior consistency
with respect to the weak topology on the model space \(\mathcal{P}\):
as we’ll describe in this section, the tests needed for the Schwartz condition exist, and so
one only needs to verify the KL support condition.
To establish weak posterior consistency, we need to show that for any
weak neighborhood \(U\) of \(p_0\),
and so we need to verify the testing condition with respect to the complement
\(U^c\).
But it turns out we can simplify this condition by verifying the condition for a simpler set.
We first explain why it is sufficient to consider the simpler set, and then we
verify the Schwartz testing condition.
Breaking down the posterior
A \(\mu\)-weak neighborhood \(U\) of \(p_0\) is a subset of \(\mathcal{P}\)
that can be represented by arbitrary unions of basis elements, given by subsets of the form
\[
V = \left\{ p \in \mathcal{P}: \forall i \in \{1,\ldots,k\}, \left| \int g_i p d\mu - \int g_i p_0 d\mu \right| < \epsilon_i \right\},
\]
where for all \(i\), \(g_i\) is a bounded, real-valued, continuous function on
\(\mathbb{X}\), \(\epsilon_i > 0\), and \(k \in \mathbb{N}\).
Note that each basis element \(V\) can be expressed as a finite intersection of
subbasis elements, or subsets of the form
which is an intersection between two sets of the form:
\[
A_i = \left\{ p \in \mathcal{P}: \int g_i p d\mu < \int g_i p_0 d\mu + \epsilon_i \right\}.
\]
Thus, the sets of the form \(A_i\) also form a subbasis for \(V\),
and the complement \(V^c = \bigcup_{i=1}^{2k} A_i^c \) is then a finite union of the complements of the subbasis elements
above.
Since \(V \subset U\) by construction, we can decompose the posterior
probability of the complement of the weak neighborhood into a sum of
probabilities over the complements of the subbasis sets:
Thus, in order to prove that \(\Pi(U^c | X_{1:n}) \rightarrow 0,
(P_0^{(\infty)}\text{-a.s.})\) as \(n \rightarrow \infty\),
it suffices to show that the probability of the subbasis set complements vanish almost surely, i.e.,
for all \(i\),
\(\Pi(A_i^c | X_{1:n}) \rightarrow 0\) a.s.
That is, we only have to verify the testing condition on these subbasis sets.
Satisfying the testing condition
As we discussed above, it suffices to prove the Schwartz testing condition
holds for sets of the form
Then the expectation of this test function can be bounded via Hoeffding’s inequality:
that is, since \(g\) is a bounded function (and w.l.o.g. can be rescaled such
that \(0 \leq g \leq 1\)),
Similarly, another application of Hoeffding’s inequality along with the
property that for any \(p \in A^c \),
\(\int g(x) p(x) d\mu(x) - \int g(x) p_0(x) d\mu(x) > \epsilon\)
implies that
\[
P^{(n)}(1-\phi_n)
\leq P^{(n)}\left(-\frac{1}{n}\sum_{i=1}^n g(X_i) > -\int g(x) \, p(x)\, d\mu(x) + \epsilon/2 \right)
\leq e^{-n\epsilon^2/2}.
\]
Thus, in order to guarantee weak posterior consistency holds, we only need to
verify that the condition that the prior has positive KL support for the true
density, as summarized by the corollary below.
Corollary (Schwartz).
Let \(\Pi\) be a prior on \(\mathcal{P}\) and suppose
\(p_0\) is in the KL support of the prior \(\Pi\).
Then the posterior is weakly consistent at \(p_0\), i.e.,
for every weak neighborhood \(U\) of \(p_0\),
When the sample space \(\mathbb{X}\) is countable, the weak topology is the
same as the topology generated by strong metrics, such as the total variation
distance. Thus, Schwartz’s theorem leads to strong posterior consistency for
discrete spaces, provided that the prior satisfies the KL support condition.
Example 3: Finite-dimensional models
Suppose the elements model class \(\mathcal{P}\) are parameterized
by a finite-dimensional parameter: i.e.,
\(\theta \mapsto p_\theta\),
where \(\theta \in \Theta \subseteq \mathbb{R}^d \).
If \(\Theta\) is compact and finite-dimensional,
the tests needed exist under mild regularity conditions, i.e., identifiability
and continuity of the map \(\theta \mapsto p_\theta\);
see, e.g., van der Vaart [7] (1998), Lemma 10.6.
Proof of Schwartz’s theorem
First, rewrite the posterior distribution of the complement of the
neighborhood \(U\) as:
By Markov’s inequality, the assumption
\(P_0^{(n)}(\phi_n) \leq e^{-Cn}\) implies that
\(\sum_{n\geq 1} P_0^{(n)}(\phi_n > e^{-Cn}) < \infty, \)
and so
the Borel–Cantelli lemma
then implies that
\[P_0^{(\infty)}(\phi_n > e^{-Cn} ~\text{occurs for infinitely many}~ n) = 0. \]
Hence, the first term in the sum above \(\phi_n \rightarrow 0\) almost surely under \(P_0^{(\infty)}\)
as \(n \rightarrow \infty\).
It remains to show that the second term has the appropriate behavior.
The goal is to control the behavior of the numerator and the denominator of the
second term of the sum such that (with \(P_0^{(\infty)}\)-probability 1) this ratio converges to 0.
Step 1:
The KL support condition on the prior \(\Pi\) – i.e., for all \(\epsilon > 0\),
\(\Pi(K_\epsilon(p_0)) > 0\) – is used to show that for any \(\beta > 0\),
Now consider the integrand in the line above and its limiting behavior (thus evaluating its liminf).
The
strong law of large numbers
implies that with \(P_0^{(\infty)}\)-probability 1, for all \(p \in K_\epsilon(p_0)\),
Since Markov’s inequality implies that \(\sum_{n \geq 1} e^{-n(C - \beta_0)} < \infty \) for \(C > \beta_0\),
by the Borel–Cantelli lemma, the numerator goes to 0 almost surely.
Finally, choosing \(\beta = \beta_0\), the ratio goes to 0 a.s.
Remarks on Schwartz’s theorem and extensions
As we saw above, the testing condition of Schwartz’s theorem is always satisfied
by the weak neighborhoods. Thus, for weak consistency to hold, all one needs to
do is to verify the KL support condition on the prior.
But for strong consistency with respect to the L1 metric, uniformly consistent tests do
not exist (LeCam, 1973 [4]; Barron, 1989 [5]).
However, it is still possible to get strong posterior consistency via an
extension of Schwartz’s theorem.
Barron (1988) [6] proved a early result on this,
and Ghosal and van der Vaart, Theorem 6.17 (2017) [1] presents an extended Schwartz theorem
that can be used to recover the classical Schwartz theorem as well as other
consistency results based on metric entropy that are useful for proving, e.g., L1 consistency.
In addition, Schwartz’s theorem has been extended to other related models, such
as priors that vary with the data, misspecified models, and non i.i.d. models.
References
Ghosal and van der Vaart (2017). Fundamentals of Nonparametric Bayesian Inference (Cambridge Series in Statistical and Probabilistic Mathematics). Cambridge: Cambridge University Press.
Ghosh and Ramamoorthi (2003). Bayesian Nonparametrics (Springer Series in Statistics). Springer-Verlag New York.
Schwartz (1965). On Bayes procedures. Z. Wahrsch. Verw. Gebiete 4, 10–26.
LeCam. Convergence of estimates under dimensionality restrictions (1973). Annals of
Statistics, 1:38–53.
Barron (1989). Uniformly powerful goodness of fit tests. Annals of
Statistics, 17(1):107–124.
Barron (1988). The exponential convergence of posterior probabilities with implications
for Bayes estimators of density functions. Technical Report 7, Dept. Statistics, Univ.
Illinois, Champaign.
Van der Vaart, A. W. (2000). Asymptotic statistics (Vol. 3). Cambridge university press.
I decided to try out Flux, a machine learning library for Julia.
Several months ago, I switched to using Python so that I could use PyTorch, and I figured it was time to give Flux a try for a new project that I’m starting.
Here, I document some of the basics and how I got started with it. Helpful
pointers for getting started are available in the official Flux documentation.
Installing Flux
Installing Flux is simple in Julia’s package manager – in the Julia interpreter, after typing ],
(@v1.4)pkg>addFlux
As of the current writing, it is recommended that you use Julia 1.3 or above.
Now we’ll present some simple examples that are modifications the original tutorial examples.
Here we assume basic familiarity with Julia syntax. Recall that * can be used to encode matrix multiplication, and the . operator can be used for broadcasting functions to array-valued arguments.
Simple gradients and autodiff
The gradient function is part of Zygote – Flux’s autodiff system – and can be overloaded in several ways.
One of the simplest uses of gradient is to pass in a function and the arguments that you want to take the derivative with respect to.
usingFluxf(x,y)=3x^2+2x+ydf(x,y)=gradient(f,x,y)
Now you can evaluate the gradient at a point:
julia>df(2,2)(14,1)
Linear regression example
Another way to use the gradient function is to pass in parameters with the
params function, which can be used to differentiate parameters that are
not explicitly defined as function arguments. This is designed to help support
large machine learning models with a large number of parameters.
First, let’s write a function to generate some data randomly:
function generate_data(N_samps)W0,b0=rand(2,5),rand(2)x=[rand(5)for_in1:N_samps]y=[W0*x[i]+b0+rand(2)foriin1:N_samps]returnx,yend
In Flux, training a model typically involves encoding the model via a prediction and a loss function on a single data point.
# Model / generate predictionpredict(x)=W*x.+b# Loss function on an examplefunction loss(x,y)ypred=predict(x)sum((y.-ypred).^2)end
Here the model (i.e., predict function) only comes in to the loss function and isn’t needed directly otherwise.
usingFlux.Optimise:update!# Generate some dataN_samps=10x,y=generate_data(N_samps)# Initialize parametersW,b=rand(2,5),rand(2)# Use gradient descent as the optimizeroptimizer=Descent(0.05)# Store epoch losslosses=[]# Run 1000 iterations of gradient descentforiterin1:1000foriin1:N_samps# Compute gradient of loss evaluated at samplegrads=gradient(params(W,b))doreturnloss(x[i],y[i])end# Update parameters via gradient descentforpin(W,b)update!(optimizer,p,grads[p])endend# Save epoch losspush!(losses,sum(loss.(x,y)))end
Note that in the inner loop, the gradient function is being used on params(W,b), which are parameters that are not explicitly defined as arguments of the loss function.
Here we’ve also used the Julia do operator, which allows you to pass a function; this can be especially useful if the function involves more complex logic.
Alternatively, this example is easily expressible as
grads=gradient(()->loss(x[i],y[i]),params(W,b))
instead of using the do operator block.
Additionally, the update! function tells us to use the optimizer (here gradient descent) to update the parameter p with the gradient.
Other optimizers can be specified in a similar manner as we did above.
For instance, we could have used ADAM by specifying:
optimizer=ADAM(0.05)
A note on getting loss values and gradients
In many cases, you might want to save the loss so that you can plot the
progress. In the above example, we recompute the loss, but you could also get it
directly when you compute the gradient. This can be done by using the
pullback function.
Below is a wrapper around pullback that returns the loss and the gradient,
which is based on the code of the gradient function.
function loss_gradient(f,args...)y,back=Flux.pullback(f,args...)returny,back(one(y))end
Thus, in the code above, we could have instead written
to get both the value of the loss and the gradient.
Flux’s train function
Another simpler way of implementing the functionality above is to use Flux’s train! function, which replaces the inner loop above.
Training requires (1) an objective function, (2) the parameters, (3) a collection of data points, and (4) an optimizer.
The inner loop can be replaced as follows:
# Run 1000 iterations of gradient descentforiterin1:1000Flux.train!(loss,params(W,b),zip(x,y),optimizer)push!(losses,sum(loss.(x,y)))end
In other words, the train! function can be viewed as taking a step of the parameters with the optimizer of your choice, evaluated with respect to a set of data points.
The train! function also accepts a callback function, that allows you to print information (e.g., the loss), which is often used with the throttle function to limit the output to, say, every 10 seconds.
In the above example, we saved the training losses in an array, in order to allow for easy plotting.
Building and training models
Building more complex models is similar to the example above, but now we can compose different functions.
Again, we can call train once we specify a loss (where again the model only comes into the loss function), a set of parameters, data, and the optimizer.
There are many examples of how to build up layers in the Flux basics guide
and the model reference.
For instance, the basics guide presents the following two examples.
The first is composing two linear layers with sigmoid nonlinearities, given by the σ function:
function linear(in,out)W=randn(out,in)b=randn(out)x->W*x.+bendlinear1=linear(5,3)linear2=linear(3,2)model(x)=linear2(σ.(linear1(x)))
Another example presented in the basics guide is using the Chain utility:
model=Chain(Dense(10,5,σ),Dense(5,2),softmax)
Here Dense is another utility that represents a dense layer.
Other types of layers are detailed in the model reference, including convolution, pooling, and recurrent layers.
After building models, we can then again use the train! function as before.
Specific working models can be found in the Flux model zoo, which includes examples such as simple multi-layer perceptrons, convolutional neural nets, auto-encoders, and variational-autoencoders.
Overall impressions
Overall, I found Flux easy to use, especially if you’ve used something like PyTorch before. I liked how it felt very well-integrated with the Julia language – it really felt like just coding in Julia, rather than having to learn a whole new framework.
One thing I think could be better supported is the documentation – I found that it was good enough to get started and learn the functionality of Flux, but for instance, some basic docstrings for important functions were missing.
But as they state on their home page, “you could have written flux” – i.e., the source code is all straightforward Julia code.
Thus, you can easily read the source to get a better idea of the functionality. For instance, the loss_gradient wrapper above was super simple to add after reading the source code for the gradient function.
I think this leads to exciting opportunities to contribute and join the Flux community.
Probabilistic numerical methods have experienced a recent surge of interest. However,
the literature of many key contributions date back to 60s-80s, a period before
many modern developments in computing. The goal here is to collect a relevant, organized reading list here. I hope to update
this post with more references and possibly short descriptions of the papers as
I get to reading more of them.
Here are recent surveys that collect a lot of the literature and developments in the field as well as open problems the authors believe are important to tackle.
The first discussion of probabilistic numerics apparently dates back to
Poincaré in 1896. Here we collect some important papers building
foundations in probabilistic numerics, which mostly focused on the problem of integration.
Sul’din, A. V. (1959). Wiener measure and its applications to approximation
methods. I. Izvestiya Vysshikh Uchebnykh Zavedenii. Matematika, (6), 145–158.
Sul’din, A. V. (1960). Wiener measure and its applications to approximation
methods. II. Izvestiya Vysshikh Uchebnykh Zavedenii. Matematika, (5),
165–179.
Kimeldorf, G. S., & Wahba, G. (1970). A correspondence between Bayesian
estimation on stochastic processes and smoothing by splines. The Annals of
Mathematical Statistics, 41(2), 495–502.
Larkin, F. M. (1972). Gaussian measure in Hilbert space and applications in
numerical analysis. Rocky Mountain Journal of Mathematics, 2(3), 379–422.
Micchelli C. A., & Rivlin T. J. A survey of optimal recovery. Optimal Estimation in
Approximation Theory. Springer, 1977, 1–54.
Kadane, J. B., & Wasilkowski, G. W. (1985). Average case epsilon-complexity
in computer science: A Bayesian view. In Bayesian Statistics 2, Proceedings
of the Second Valencia International Meeting (pp. 361–374).
Diaconis, P. (1988). Bayesian numerical analysis. Statistical Decision Theory
and Related Topics IV, 1, 163–175.
(Additional notes)
A note on the quadrature problem, i.e., estimating the integral \(\int_0^1 f(x) dx\)
by considering a prior on \(f\), computing a posterior on \(f\) conditioned
on information at a finite number of points \(f(t_1),\ldots,f(t_n)\), and
then estimating the integral using the Bayes decision rule.
Example: when using Brownian motion as a prior, the conditional expectation
yields the classical trapezoidal rule for quadrature.
Considers the problem of taking classical numerical procedures and seeing if
they correspond to optimal decision rules (e.g., Bayes, minimax or admissible).
In addition to a posterior distribution, the Bayesian approach also yields a clear approach to the
design problem: i.e., how do we choose the information so that we get the best estimate of the integral?
Discussion on priors that lead to linear interpolation, historical developments, recent applications, and connections with Stein estimation and consistency.
Recent papers on probabilistic numerics
For lack of a better title, here we collect more recent papers on probabilistic numerics, focusing on
general overviews, rather than specific numerical methods.
Decision-theoretic views on probabilistic numerics
These papers propose probabilistic methods for solving linear systems \(Ax=b\), where generally a prior is placed on either the unknown quantity \(A^{-1}\) or \(A^{-1}b\), and posterior point estimates often have an explicit relationship with classical itereates obtained from iterative algorithms, such as the conjugate gradient method.
One of the most fundamental math problems is solving a linear system:
\[ Ax = b, \]
where \(A \in \mathbb{R}^{n \times m}\) is a matrix, and \(x \in \mathbb{R}^n\)
and
\(b \in \mathbb{R}^m\) are vectors;
we are interested in the solution,
\[ \tilde x = A^{-1} b, \]
given by the matrix-vector product of the pseudoinverse of the matrix \(A\)
and the vector \(b\).
Now, for the rest of this post, we’ll consider the case where the number of rows and columns are equal, i.e., \(n=m\) and
further assume that \(A\) is a symmetric, positive definite (s.p.d.) matrix.
This guarantees that an inverse exists.
Typically (without making assumptions on the structure or sparsity of the matrix),
matrix inversion via Gaussian elimination (a.k.a. LU factorization) requires
\(O(n^3)\) computation.
There are many other types of matrix factorization algorithms, including the
Cholesky decomposition, which applies to s.p.d. matrices that can be used
to solve the problem.
However, when the dimension of the problem is very large—for instance,
on the order of millions or even larger—matrix factorization becomes too computationally expensive.
Trefethen and Bau [3, pp. 243] give the following dates and sizes for what was considered
“large” in terms of so-called direct, dense matrix inversion methods:
1950: \(n = 20\) (Wilkinson)
1965: \(n = 200\) (Forsythe and Moler)
1980: \(n = 2000\) (LINPACK)
1995: \(n = 20000\) (LAPACK) -
LAPACK remains a popular
for linear algebra computations today.
Some problems where large linear systems that come up in practice include
Kalman filters, problems large covariance matrices (e.g., in genetics),
large kernel matrices the size of the square of the number of data points,
large regression problems, spectral methods for large graphs.
In these cases, iterative methods, such as conjugate gradient, are popular,
especially when the matrix \(A\) is sparse.
In direct matrix inversion methods, there are typically \(O(n)\) steps, each requiring
\(O(n^2)\) computation; iterative methods aim to cut down on the running time
of each of these numbers, and the performance typically depends on the spectral
properties of the matrix.
In this post, we’ll give an overview of the linear conjugate gradient method,
and discuss some scenarios where it does very well, and others where it falls
short.
The conjugate gradient algorithm
The basic idea of conjugate gradient is to find a set of \(n\)
conjugate direction vectors, i.e., a set of vectors \(p_1,\ldots,p_n\) satisfying
\[ p_i \, A \, p_j = 0, \quad \forall i \neq j. \]
This set of vectors has the property of being linearly independent and spanning
\(\mathbb{R}^n\).
Before discussing the conjugate gradient algorithm, we’ll first present the
conjugate directions algorithm, which assumes that we are given a set of \(n\)
conjugate vectors.
Then we’ll see that conjugate gradient is just a special type of conjugate
directions algorithm that can generate the next conjugate vector using only the
current vector, a property which gives rise to its computational efficiency.
Conjugate directions algorithm
Suppose we are given the set of conjugate vectors \(p_1,\ldots,p_n\).
The conjugate directions algorithm constructs iterates stepping in these
directions:
\[ x_{k+1} = x_k + \alpha_k p_k,\]
where \(p_k\) is the \(k\)th conjugate direction, and
the step size \(\alpha_k\) is obtained as the minimizer of the convex
quadratic equation along \(x_k + \alpha p_k\):
\[ \phi(x) = \frac{1}{2} x^\top A x - b x.\]
Note that the gradient of this equation recovers the solution of original equation of
interest
\[ \nabla \phi(x) = A x - b =: r(x).\]
The above equation, which we define as \(r(x)\) is called the residual.
Furthermore, define the residual at iterate \(x_k\) as \(r_k := r(x_k)\).
Below, we list two properties that hold for any conjugate directions algorithm.
The proofs are in Theorem 5.1 and Theorem 5.2 of Nocedal and Wright [2].
Conjugate directions converges in at most \(n\) steps
An important result is the following: any sequence of vectors generated by the
conjugate direction algorithm converges to the solution \(\tilde x\)
in at most \(n\) steps.
Expanding subspace minimization
Another important property is that the residual at the current iterate, \(r_k\),
is orthogonal to all previous conjugate vectors: i.e.,
Furthermore, each iterate \(x_k\) is the minimizer of the quadratic function \(\phi\)
over the set defined by vectors in the span of the previous search
directions plus the initial point:
\[ \{ x : x = x_0 + \mathrm{span}(p_0, \ldots, p_{k-1})\} .\]
Conjugate gradient algorithm
How do generate a set of conjugate directions?
Methods such as computing the eigenvectors (which are conjugate) of \(A\)
are expensive. The conjugate gradient algorithm generates a new \( p_{k+1}\) using the vector
\(p_k\) with the property that it is conjugate to all existing vectors.
As a result, little computation or storage is needed for this algorithm.
The initial conjugate vector \(p_0\) is set to
the negative residual at the initial point, i.e., \(p_0 = - r_0 \);
recall that the residual is defined to be the gradient of the quadratic objective function,
and so, this is the direction of steepest descent.
Each subsequent point is a linear combination of the negative residual \(-r_k\)
and the previous direction \(p_{k-1}\):
\[ p_k = -r_k + \beta_k \, p_{k-1}, \]
where the scalar
\[ \beta_k = \frac{r_k^\top A p_{k-1}}{p_{k-1}^\top A p_{k-1}} \]
is such that the vector \(p_k\) along with the previous search directions are conjugate.
The above expression for \(\beta_k\) is obtained by premultiplying \(p_k\)
by \(p_{k-1} A\) and the condition that \( p_{k-1}^\top A p_k = 0 \).
The final algorithm for conjugate gradient involves a few more simplifications.
First, the step size can be simplified by recognizing that \(r_k^\top p_i = 0\) (from the expanding subspace minimization theorem),
and substituting \(p_k = -r_{k} + \beta_{k} p_{k-1}\) to get
\[\alpha_k = \frac{r_k^\top r_k}{p_k^\top A p_k}. \]
Similarly, we can rewrite the scalar for the linear combination as
The directions produced by conjugate gradient are conjugate vectors and
therefore converge to the solution in at most \(n\) steps [2, Theorem 5.3].
However, we can say a few more things.
If the matrix has \(r\) unique eigenvalues, then the algorithm converges in at
most \(r\) steps [2, Theorem 5.4].
Clustered eigenvalues
If some eigenvalues are clustered around a value, it’s almost as if those were 1
unique eigenvalue, and thus, the convergence will generally be better.
For instance, if there are 5 large eigenvalues and the remaining eigenvalues are
eigenvalues clustered around 1, then it is almost as if there were only 6
distinct eigenvalues, and therefore we’d expect the error to be small after
about 6 iterations.
Numerical stability vs computational tradeoffs
Conjugate gradient is only recommended for large problems, as it is less
numerically stable than direct methods, such as Gaussian elimination.
On the other hand, direct matrix factorization methods require more storage and
time.
Aside: Krylov subspace methods
As an aside,
conjugate gradient is a member of the class of Krylov subspace methods,
which generate elements from the \(k\)th Krylov subspace generated
by the vector \(b\) defined by
\[\mathcal{K}_k = \mathrm{span} \{ b, Ab, \ldots, A^{k-1} b \}. \]
These methods have the property of converging in the a number of steps equal to
the number of unique eigenvalues.
Other popular Krylov subspace methods include GMRES, Lanczos, and Arnoldi
iterations. More details can be found in Trefethen and Bau [3].
Preconditioning
The goal of preconditioning is to construct a new matrix / linear system, such
that the problem is better-conditioned, i.e., the condition number
(the ratio of largest to smallest singular values with respect to Euclidean norm) is decreased or the eigenvalues are
better clustered (for the case of conjugate gradient).
Choosing an appropriate preconditioned leads to better convergence of the
algorithm.
Let \(C\) be a nonsingular matrix. Then applying the change of variables
\[ \hat x = Cx \implies x = C^{-1} \hat x, \]
to the original quadratic objective \(\phi\) gives
\[ (C^{-\top} A C^{-1}) \, \hat x = C^{-\top} b.\]
Thus, the goal of the preconditioner is to pick a \(C\) such that the matrix
\( (C^{-\top} A C^{-1}) \) has good spectral properties (e.g., well-conditioned or clustered eigenvalues).
The modified conjugate gradient algorithm does not directly involve the matrix \((C^{-\top} A C^{-1})\).
Instead it inolves the the matrix \(M = C^\top C\) and solving 1 additional linear system
with \(M\).
One type of preconditioner used in practice is the Incomplete Cholesky
Procedure, which involves constructing a sparse, approximate Cholesky
decomposition that is cheap to compute: that is,
\[A \approx \tilde L \tilde L^\top =: M, \]
where we’ve chosen \(C = \tilde L^\top \).
The idea is with this choice of preconditioner, we’ll have
\[ C^{-\top} A C^{-1} \approx \tilde L^{-1} \tilde L \tilde L^\top \tilde L^{-\top} = I. \]
We won’t explore preconditioners further in this post, but additional details
can be found in Nocedal and Wright [2, pp. 118-120].
Implementation and empirical study
We implement the conjugate gradient algorithm and study a few example problems.
The full code for this post is linked at the bottom of this post.
Julia code snippet
Below is a Julia code snippet implementing a basic conjugate gradient algorithm.
The inner loop iteration is:
function iterate_CG(xk,rk,pk,A)"""
Basic iteration of the conjugate gradient algorithm
Parameters:
xk: current iterate
rk: current residual
pk: current direction
A: matrix of interest
"""# construct step sizeαk=(rk'*rk)/(pk'*A*pk)# take a step in current conjugate directionxk_new=xk+αk*pk# construct new residualrk_new=rk+αk*A*pk# construct new linear combinationbetak_new=(rk_new'*rk_new)/(rk'*rk)# generate new conjugate vectorpk_new=-rk_new+betak_new*pkreturnxk_new,rk_new,pk_newend
The full algorithm is below:
function run_conjugate_gradient(x0,A,b;max_iter=2000)"""
Conjugate gradient algorithm
Parameters:
x0: initial point
A: matrix of interest
b: vector in linear system (Ax = b)
max_iter: max number of iterations to run CG
"""# initial iterationxk=x0rk=A*xk-bpk=-rkforiin1:max_iter# run conjugate gradient iterationxk,rk,pk=iterate_CG(xk,rk,pk,A)# compute absolute error and break if convergederr=sum(abs.(rk));push!(errors,err)err<10e-6&&breakendprintln("Terminated in $i iterations")returnxkend
Examples
We first look at two small toy examples. The first is a diagonal matrix, where
we set the eigenvalues. The second is a randomly generated s.p.d. matrix.
Next we look at a larger-scale setting, where were randomly generate two
matrices, one that is better-conditioned, and one that is worse-conditioned
(i.e., smaller vs larger condition numebrs). We see that the latter takes many
more iterations (than the first problem, but also than the dimension of the
problem) due to numerical errors.
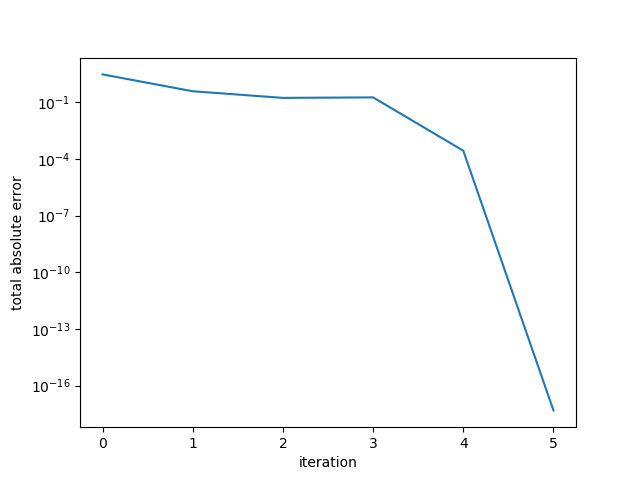
Example 1: Small diagonal matrix
In our first example, we construct a 5x5 diagonal matrix with 3 eigenvalues
around 10, 1 eigenvalue equal to 2, and 1 equal to 1:
Running the conjugate gradient, the algorithm terminates in 5 steps.
We examine the error in the residual by computing the sum of the absolute residual components.
Note that this is not the error in the solution but rather the error in the system.
We see that the error drops sharply at 4 iterations, and then again in the 5th iteration.
Example 1. Small diagonal matrix.
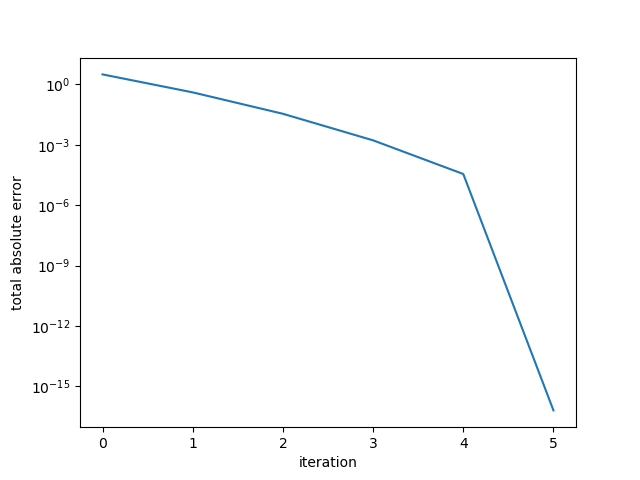
Example 2: Small random s.p.d. matrix
In our next example, we construct a 5x5 random s.p.d. matrix:
Here the error drops sharply at the 5th iteration, reaching the desired convergence
tolerance.
Example 2. Small random s.p.d. matrix.
Example 3: Large random s.p.d. matrix (smaller condition number)
Next, we examine a matrix of dimension 1000, and generate a random s.p.d matrix.
A=rand(N,N)A=0.5*(A+A')A=A+50*I
Note that in the above snippet, the last line adds a large term to the diagonal,
making the matrix “more nonsingular.” The condition number is:
>cond(A)14.832223763483976
The general rule of thumb is that we lose about 1 digit of accuracy with
condition numbers on this order.
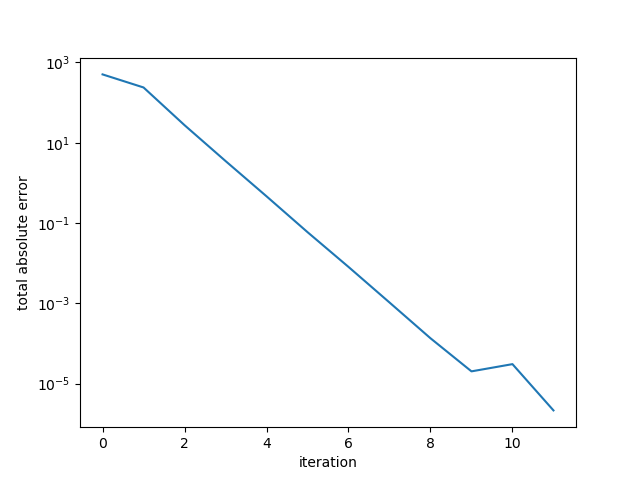
The absolute error of the residual is plotted against iteration.
Here the algorithm terminated in 11 iterations.
Example 3. Large random s.p.d. matrix, better conditioned.
Example 4: Large random s.p.d. matrix (larger condition number)
Now we examine a matrix again of size 1000 but this time with a smaller
multiplier on the diagonal (here we picked the smallest integer value such that the
eigenvalues of the resulting matrix were all nonnegative):
A=rand(N,N)A=0.5*(A+A')A=A+13*I
The condition number is much larger than the previous case, almost at \(10^3\):
>cond(A)2054.8953570922145
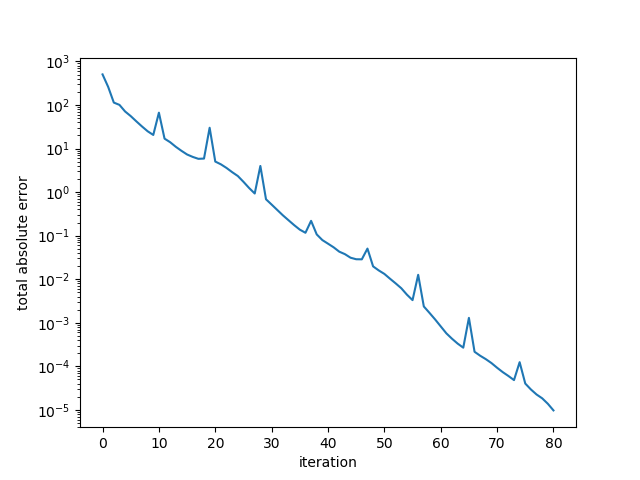
The error plot is below:
Example 4. Large random s.p.d. matrix, worse conditioned.
Here, the algorithm converged after 80 iterations. A quick check of the “conjugate” vectors shows that
the set of vectors is indeed not conjugate.
Code on Github
A Jupyter notebook with all of the code (running Julia v1.0) is available on Github.